介绍
90年代末,基于现役机器人技术,出现了一种用于检查和清洁地面储罐(AST)地板的独特技术。自那时以来,该技术取得了长足的进步,拥有了新的检查和油罐清洗能力,更高的操作效率,以及更广泛的用户基础。使用在役机器人检查的坦克数量现已超过700辆。为了确定下一次停机检查的最佳时间,业界现在有了一种确定储罐最小底板厚度的替代方法。这可以在不停止使用油箱的情况下完成。符合API Std 653标准1确定罐底腐蚀速率的指南,并结合API 653罐外部测量,TechCorr,一家跨国全方位服务检测公司,采用这种方法,使池主能够在不停机的情况下全面了解AST的情况,同时具备清除污泥的能力。尽管由于油罐的状况、使用年限和检查历史,有一部分油罐需要进行停用检查,但仍有越来越多的油罐将受益于这项技术的引入。
本文讨论了在役高密度超声扫描用于评估AST地板状况的具体技术能力。主题,如安全和环境风险降低,以及技术成本节约的跟踪记录也涵盖在内。除泥/清洁油罐底的能力是机器人系统的一个额外能力,但这篇文章没有详细说明。
传统的报废的检查
常规检查罐的方法要求操作人员完全释放罐中的产品和蒸汽。产品首先通过固定管道排水,然后通过临时管道排水,以去除大部分的体积。经常使用刮刀、柴油稀释剂和水来去除残留产品。偶尔使用风扇,有时与蒸汽回收/燃烧设备一起去除罐内的蒸汽。
如今,越来越多的人开始使用机器人来减少停机时间,并在排空水箱后的第一天开始清除污泥。TechCorr有多种工具来实现这一目标,其细节超出了本文的范围。一旦储罐被认证为无蒸汽,储罐底板就准备进行检查,通常是通过喷砂。然后使用各种检测技术,包括磁通排除(MFE)和接触超声检测(UT)。进行修理,如果需要,坦克人通道重新密封,坦克返回服务。整个过程可能需要一周到六个月的时间,这取决于储罐的大小、产品、工厂和承包商的时间表以及维修范围。
机器人在职检查
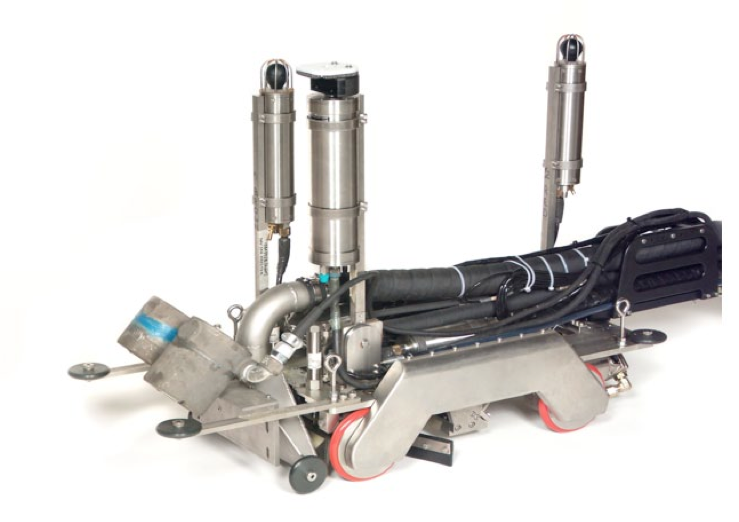
通过脐带将机器人与先进的控制和监控系统系在一起,进行储罐的机器人检查。在储罐服役期间,机器人会被放置到储罐底部,利用能够绘制储罐底部地图和收集高密度UT数据的位置的系统,在储罐底部导航。机器人定位精度的绝对值为+/- 1至2英寸,相对精度为mm。安装在机器人后面的泵会清除罐底的水和沉淀物,机器人下方的一系列浸入式传感器会读取罐底的UT厚度读数,测量底板厚度,以识别顶部和底部的腐蚀情况。系统的照片如图1所示。
















评论和讨论
添加一个评论
请登录或188abc金博宝 参与评论和讨论。