摘要
炼油厂结构需要经常检查和维护,以保持结构健康和安全的工作做法;然而,由于其巨大的高度和尺寸,进入建筑变得越来越难。为了解决这一问题,许多研究人员已经开发了几种墙体爬行机器人,但在此基础上还需要进一步的研究。现有的壁面爬行机器人没有在该领域得到更广泛的应用的主要原因之一是由于强风等恶劣环境和粗糙地表条件的不可预测性导致操作失败而导致设备意外坠落的风险。因此,我们尝试开发一种贴壁空中机器人平台,它可以通过飞向目标并贴附在目标上来接近结构上的任何区域。机器人配备了电磁保持/安装元件,将传感器探头“粘”在结构的铁磁表面上。本文介绍了在空中机器人上安装贴壁机构的方法。
简介
无人机(UAV)通常被称为无人机,由于其灵活性和实用性,已经变得越来越自主。无人机一开始只是消费者和业余爱好者的一种现象,但最近它们已经成长为对工业资产和一系列其他企业用途的远程视觉检查的有用工具。仅去年一年,无人机初创公司就获得了超过4.5亿美元的投资无人机是当今检验行业已经使用的技术的一大补充。无人机检查的商业需求正在迅速增长,每天都有新的应用探索。
虽然非接触式无人机检测,如视觉、光学、红外、激光雷达和气体探测器等,正在迅速发展为一种商品业务,但仍需在航空机器人和无损检测(NDT)测量技术方面做出大量努力,以实现传统的接触式无损检测,如超声检测(UT)和涡流检测(ECT)。
这里讨论的项目的目标是发展无人机检查解决方案集成最新的机器人技术。更具体地说,提供能够执行接触无损检测(如UT和ECT)的工业空中机器人,利用紧凑的无线检测技术。
在其整个使用寿命中,地面储罐暴露在相当大的操作和环境力量下,并受到腐蚀和裂缝在地表和地下水平。通常使用起重机、脚手架、绳索和众多人员来检查储罐和整体结构。执行维护和检查对那些执行工作的人来说可能是昂贵的、耗时的和有风险的。一个潜在的解决方案可能是自动无人机。
检测机器人已经在石油和天然气行业发挥着重要作用,可以帮助检查、监控和监视复杂结构。机器人的使用可以帮助减少人工参与(物理),提高操作效率,降低成本,提高安全性。
贴壁无人机的概念
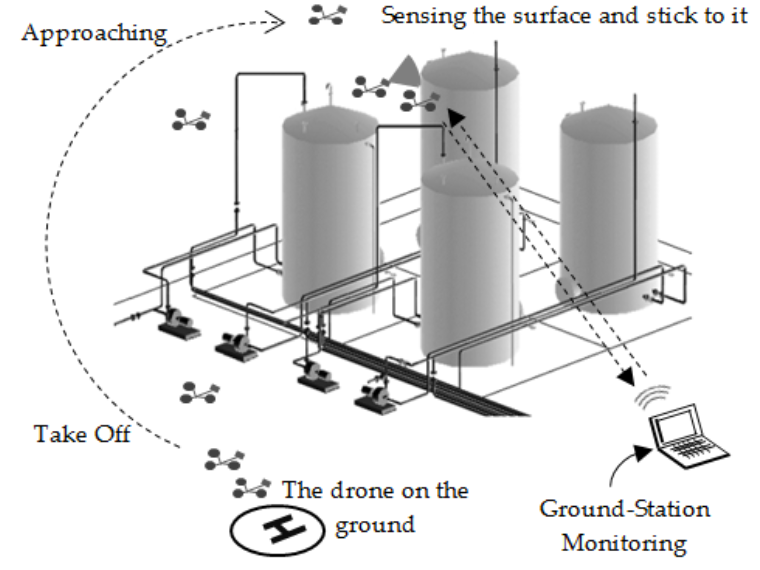
无人机通过结合推力和电磁力,使无人机轮子与表面之间的摩擦最大化,从而“粘”在结构壁上。[2,3]在我们的测试中,我们能够通过结合推力和电磁力将无人机贴在储罐壁上,将传感器探头压在金属表面上。如果摩擦系数大于1,机器人就能在向壁面的推力作用下粘附在垂直面上。[4,5]利用简易三旋翼机对该机理进行了研究,并进行了室外试验。图1说明了贴壁无人机的原理。
系统描述
研究了基于接触的无人机检测,以评估在石油天然气和石化行业中可以发现的结构(如储罐)随机点进行超声厚度检测的可能性。该项目是为了确定将超声波传感器探头连接到开源机器人车辆上的可行性(见图1).
在设计该系统时,其主要特点和功能是易于使用、模块化的快速部署传感器、实时数据显示,以及重要的是,符合危险环境的安全规范和法规。
在这些测试中使用的无人机能够垂直起飞和降落(VTOL)。它的选择基于以下一组标准:
- 成本和可用性
- 备件和易修理性
- 开源硬件和软件
框架设计
UAV是三旋翼或(偏航),目标是偏航功能不同。后电机旋转给予偏航更像一架直升机,而四轴直升机使用差速扭矩实现偏航。差转矩比偏航更弱、更慢。四轴飞行器的工作假设系统基本上是平衡的,只有轻微的扭矩变化将产生偏航。相反,旋转后电机将产生更强大的真实和直接偏航控制(见图2).

无人机机架的主要材料为碳纤维板和管道。电机的选择是基于机架尺寸、螺旋桨尺寸、电池容量和电机驱动。图3给出了无人机总体系统框图。
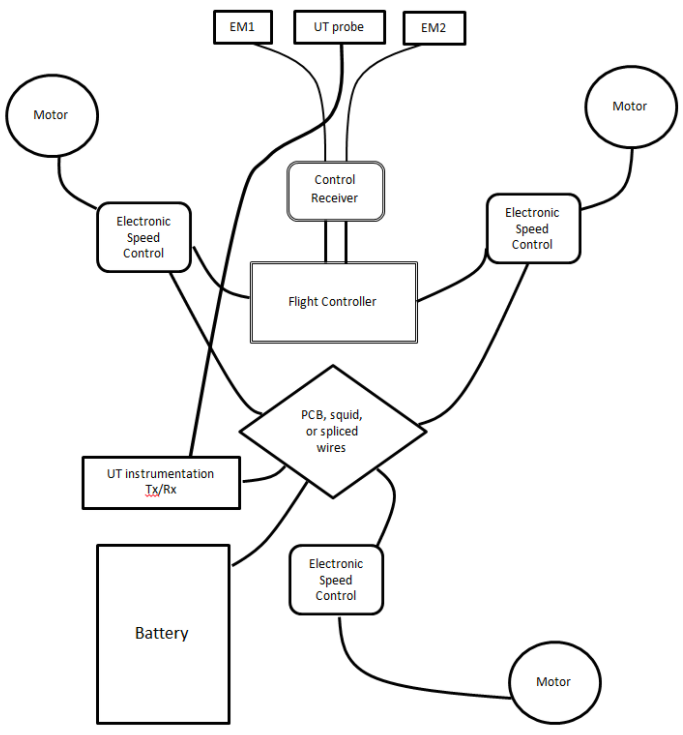
可互换的传感器模块安装在平台上。传感器数据通过飞行计算机通过无线链路传输到地面站应用程序。地面站应用软件实时显示传感器数据。无人机平台包括一个Y直升机接入面板(S),三架直升机电池托盘,起落架板,Y直升机机架,用于旋转电机的电机安装,M3和M4锁紧螺母固定板,伺服安装,固定电机安装,伺服安装碳标签(ENV), GPS传感器,16000毫安时电池,RC接收机/发射机,ESC电机,和一个Pixhawk控制模块。EM1和EM2是电磁探针。
该组件支持一个可扩展接口,用于将自定义传感器附加到无人机,克服了一些单一用途平台的限制,这些平台转换为其他任务成本高昂。由于传感器系统是模块化的,传感器可以快速交换。硬件平台很容易容纳传感器。可能使用建立的开源基础设施实时从无人机收集传感器探头数据。无人机不需要对操作者可见;然而,需要一定程度的视距,以确保信号不丢失和实时数据丢失。传感器测量模块及其收发单元安装在顶棚内,并可以以各种方式安装到支架上。这将不会干扰无人机的结构完整性,只要模块保持在一定的物理限制。
粘壁
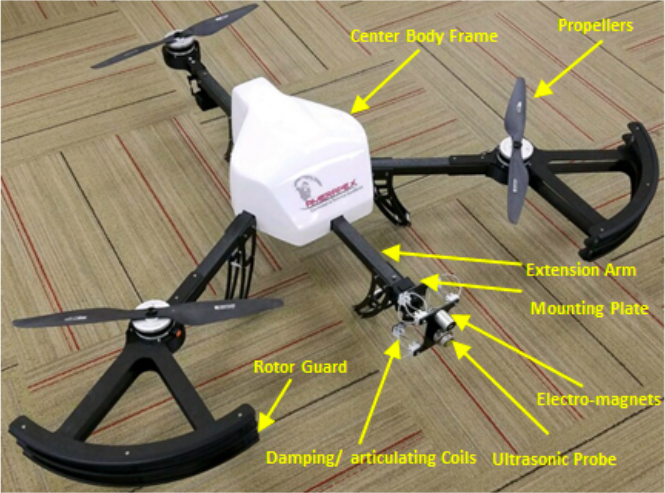
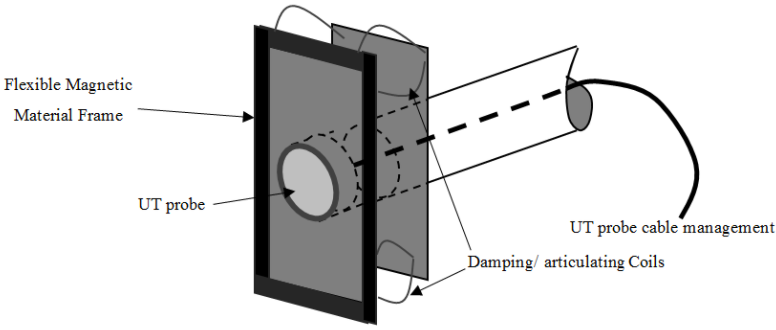
这种无人机具有像大多数普通无人机一样盘旋的能力,并由操作员远程手动控制。它有一个固定的延伸臂,可以从邻近的刀片延伸很远,安装板包含一个紧凑和轻量级的连接柔性线圈(见图4).在数据采集期间,无人机可能基于转向质量和/或侧风的影响,进行关于其俯仰轴的旋转运动,例如垂直运动(向上或向下)和/或侧运动(向右或向左)。
这种突然、突然的事件可能导致无人机的传感器探头从被询问的表面分离或移除,并阻止它获取检查读数。当UAV直接飞向目标表面和降落在探测侧(UAV的正面)时,一个连接关节或(线圈)通过吸收冲击来协助。通过结合无人机和探针周围的电磁单元产生的推力,实现了传感器探针对表面的适当压力和接触分布。
由碳纤维制成的前转子保护装置安装在这个特殊的单位,以保护他们与墙接触。超声波探头对表面进行测量。当UAV附着到目标墙上时,它保持静止几秒(2到3秒)以进行UT测量。这允许在ASNT“超声波检测标准和实践”的检查下测量金属表面的厚度。超声探头诱导00压缩波超声信号,通过表面和次表面传播,从背面反射的信号被探头检测到,并转换为数字厚度读数。
测试最初是在没有任何磁铁的情况下使用传感器进行的。后来,为了防止它在表面移动,我们添加了一个小的永久磁铁。由于控制逻辑中固定的航向设置,控件最终出现了问题。这导致方向舵/偏航的行为不正确超过几次。为了使这项工作长期进行下去,他们决定修改飞行控制代码,在推动墙壁时将其置于“速率”陀螺模式。这防止了过度控制,并允许无人机稳定,但具有一定的运动灵活性,推动墙壁建立一个良好的测量夫妇,没有任何重大问题。
我们测试了一个轻,灵活的永久磁铁(显示在图5).附着力32磅。它的宽度为1英寸,重3.3盎司。
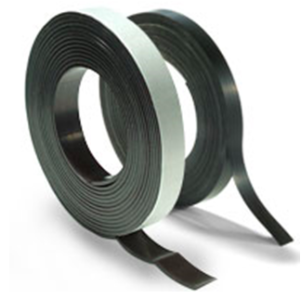
柔性磁性材料包裹在探针的安装架上,如图所示图6.然而,测试飞行表明,我们可以把无人机推到墙上,它保持相对稳定,没有永磁体。永磁体并没有显示出任何明显的帮助来将探针贴在墙上,因为我们确定磁铁的表面接触面积不足以产生所需的牵引力。有效的力量将需要一个永久磁铁,这将是太笨重,因此,这是不可行的目的。
为了获得可靠读数所需的粘附力和固定水平,建议使用两种电磁铁(EM)。电磁结合了电磁体和永磁体的优点。每个EM都是圆形设计,提供高达120磅的粘结力。他们是由一个镀锌的情况下,1.5“直径× 1.5”长-重量10盎司。电气规格是:#20 AWG引线× 24“长在磁铁外,12 VDC, 4.0瓦,和100%的占空比标准。这个装置能产生很强的磁性接触以铁为目标,支持无人机、遥控遥控。在这个特殊的装置中,超声探头和两种电磁都装在一块铝板中,如图所示图7a、7b.


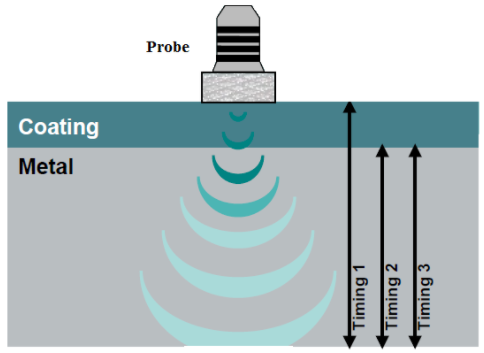
所使用的超声波测厚仪是一种商用现货设备,专为普通测厚应用而设计,其附加的好处是能够存储测量值在压力表中。所有的超声波测厚仪都应按被测材料的声速进行校准。涂层的声速与金属的声速不同。重要的是,涂层厚度或其影响不包括在金属基板的测量。能够执行UT多重回波测量的使用使得识别涂层并从测量中消除它成为可能。所使用的探针是2.25 MHz,可以很好地用于严重腐蚀的金属。其分辨率和精度分别为0.1 mm(~0.005英寸)和±0.1 mm(~0.005英寸)。发射的超声波脉冲穿过涂层和金属,并从后墙反射回来。然后,返回的回声在金属内部回响,每次只有一小部分回声通过涂层返回。小回声之间的时间差反映了金属内部回声的时间差,这与金属的厚度有关。 The gauge will interpret the echoes automatically and calculate the thickness. The measuring range of a 2.25 MHz probe goes down to 3 mm (0.120”), which is perfectly acceptable in most applications. This technique is referred to as the automatic measurement verification system (AMVS) (see图8).
锂离子电池因其重量轻、容量大、放电率高、储能与重量比好而被用来为系统提供动力。传感器模块接收到的读数通过遥测模块直接传输到移动地面站;在无人机上,无线电连接模块直接连接到飞行计算机。
在探头上安装了专门用于超声波检测的干耦合装置(弹性体),用于接触式检测。不像其他干法偶联剂通常用作超声探头的组成部分,这种弹性体可以独立于探头使用。该材料的声阻抗几乎与水相同,其衰减系数低于所有其他记录的弹性体和许多塑料。它是具有极低(≈零)速度延迟线的柔性联轴器垫,避免了湿式联轴器在多孔或耐火表面使用时的缺点。它可以消除材料的吸收,避免凌乱的残留物。
相关工作探讨
无人机检测领域的其他研发人员在目视检测方面也取得了类似的成果,但在接触式检测方面存在不足。许多公司都有能力进行视觉检测,包括从空中角度检测腐蚀,与其他形式的高架检测相比,这可以节省大量的时间和金钱。然而,它们仍然依赖于无人机检查和使用探针进行测量的人员检查的组合。在这篇文章中讨论的无人机展示了成功地结合视觉检测和基于接触的检测的能力。
测试和结果
无人机超声波测试的可行性通过开发一种基于三翼机的无人机和使用弱永磁体进行室外实验测试进行了检查,如所示图6.作者最初使用一个更简单和更小的版本的三旋翼机进行测试,同时微调飞行控制代码,以最大限度地减少对主机组的损害。
无人机测试表明,无人机从地面起飞,在目标区域附近悬停,具有高稳定性,并使用来自无人机本身的EMs和力/压力坚持它。在悬停场景中看到图9,不同的场景展示了无人机如何保持接触,即使存在运动或不稳定,由于高风速或其他机械不稳定。EM足够强大,可以握住无人机,它在安装板的角落有灵活的环形线圈,使其能够左右上下旋转,同时传感器持续稳定地接触。

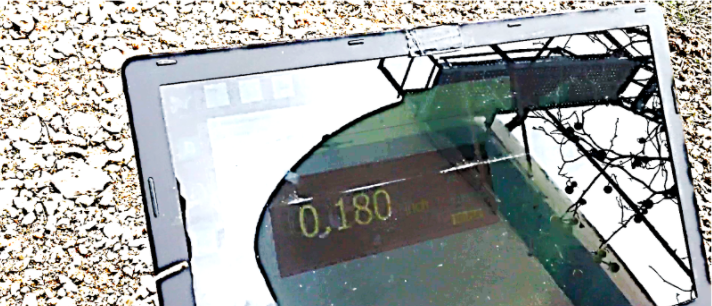
在一个原油储罐(标称厚度= 0.2英寸)的实际检测演示中(如图图10UAV起飞并且盘旋去到达它在储罐壁上的目标。当接近目标设备时,远程向网管发送“TURN ON”命令。无人机贴在墙上,一旦接触,探头就会诱导超声。厚度测量立即进行,数据在地面站笔记本电脑上实时显示(参见图10 b).可测量储罐壁厚,精度可达±0.005英寸。
操作员收到数据后,会向网管发送关闭命令。然后无人机就可以自由地飞到下一个想要的地点。作者在每节电池上进行了10次飞行试验。每次飞行的时间不超过20秒(包括起飞、悬停在检查点、粘在表面接受检查、通过无线方式将数据发送到地面)。实验结果表明,无电磁作用下贴壁成功率为90%以上,有电磁作用下贴壁成功率为100%。每组电池的飞行时间可达15-20分钟。在测试中,风速平均为每小时22英里。过程显示在图10 c其中厚度是手动测量的10倍,而不是使用无人机。

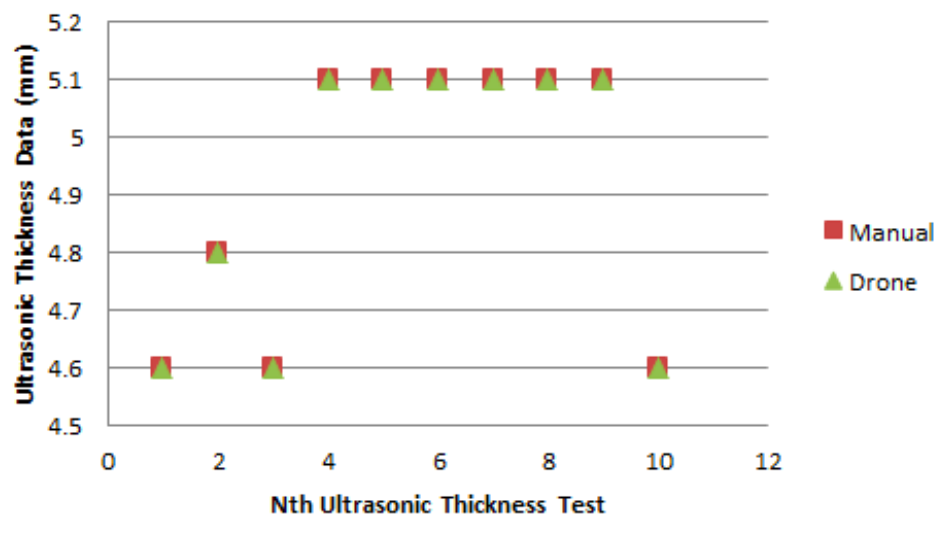
结果还显示,收集的测量数据范围为0.18到0.2英寸。来自无人机的数据与人工采集的数据100%匹配。基于作者的发现,在目标结构涂上防腐漆层或任何类型的涂层,损害了EMs的“粘着”有效性的情况下,仍然可以通过无人机产生的背压成功地进行测试,将探针保持在良好的稳定性。这也适用于非金属和非磁性表面,如混凝土、复合材料、不锈钢和木结构等。
结论
在本文中,我们论证了贴壁机器人无人机的可行性。从实验室和现场对储罐进行的测试来看,超声波检测和其他NDT方法可以利用无人机有效地部署在高空设备上。
确认
作者感谢Remy Kalai在本文的开发过程中提供的帮助。
参考文献
- Insp188游戏平台下载ectioneering日报。网上:https://inspectioneerin188游戏平台下载g.com/news/2016-04-18/5276/
- 美国石油研究所支持新型无人机技术(2017年10月10日访问)。
- Glez-de-Rivera g;加里多,j .;Ponticelli, R.设计考虑一个小型无人机平台携带中型有效载荷。2014年电路与集成电路设计会议论文集,西班牙马德里,2014年11月26-28日。
- Shin J.U.;金,d;金,J.H.;用于结构健康监测的微型飞行器爬壁机器人机构。2013年3月10日,美国加州圣地亚哥,IEEE SPIE 2013(智能结构和材料+无损评估和健康监测)会议论文集。
- 肖,j .;王慧娟,系统科学与工程的当代问题;第22章:攀爬机器人的进展;威利,得克萨斯州,美国- ieee出版社:2015。
- Myeong,厕所;荣格,K.Y.;荣格,S.W.;荣格,Y.H.;无人机式贴壁爬壁机器人的开发。第12届国际泛在机器人和环境智能会议(URAI 2015),韩国高阳,2015年10月28-30日。
- 工业SkyWorks。在线访问:http://industrialskyworks.com/oil-and-gas-drone-inspections/(2017年12月10日访问)。
- sUAS新闻,无人机业务。在线访问:https://www.suasnews.com/2017/10/catec-develops-aerial-contact-technology-inspection-drones/(2017年12月12日访问)。
- 先进航空航天技术中心。在线访问:http://www.catec.aero(2017年12月12日访问)。
- Ellenberg, a;布兰科,l;Krick, a;莎娃,即;Kontsos, A.使用无人机对基础设施进行定量评估。j . Infrastruct。系统。2014,21,04014054。
- Sankarasrinivasan,美国;Balasubramanian大肠;恋人,k;Chandrasekar,美国;基于集成无人机和图像处理系统的民用建筑结构健康监测。Procedia第一版。中国科学:地球科学,2015,31(5):532 - 536。
- Eschmann c;郭:;郭,h;用于远程建筑检查和监控的无人机系统。第六届欧洲结构健康监测研讨会论文集,德累斯顿,德国,2012年7月3-6日。
- 可以忍受,m;船舶检测用轻型磁爬船机器人的设计与控制Vögele, t。2011年6月20-23日,希腊科孚,2011年第19届地中海控制与自动化会议(MED)论文集。
- 舒克拉,a;全新课题,h;基于视觉数据的无人机自主跟踪导航控制器,用于油气管道检测。2016第16届控制、自动化和系统国际会议(ICCAS)论文集,韩国庆州,2016年10月16-19日。
- 李,w;南,j .;张成泽,b;在狭窄的管状环境中,用于无线自扩展支架输送的爬行磁机器人系统的选择性运动控制。IEEE反式。电子学报,2017,64,1636-1644。
- Na,至此;Baek, J.基于阻抗的结合无人机的民用基础设施结构健康监测无损检测方法。达成。科学通报,2017,15。
















评论和讨论
添加一个评论
请登录或188abc金博宝 参与评论和讨论。